Navigation : Home : FoveaPro : FoveaPro Tutorial : Part 9
Image Analysis Cookbook 6.0: Part 9
3.A.6. Pseudo-color, pseudo-3D, and other display tools
Human vision can distinguish hundreds of colors, but only 20-30 grey levels. The use of false- or pseudo-color look-up tables (CLUTs) makes small brightness differences visually evident, but can also break up the Gestalt of the image and should be used with care. Color tables can be applied by converting the image to indexed color mode and creating or loading a color table, or by converting the image to RGB color mode and using the IP•Color–>Apply Color Table to load the CLUT file from disk. These CLUT files are identical to the Photoshop indexed color tables (*.act) and can be created using the Photoshop color selection tools.
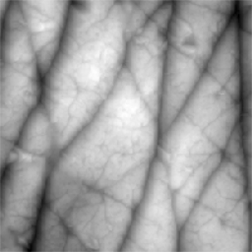
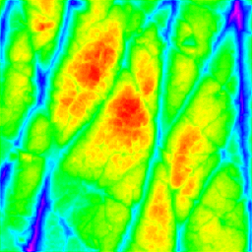
Original Skin image and the use of a CLUT with a spectrum of saturated colors
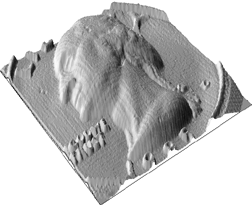
Because human vision is very experienced with surfaces, it is often useful to render an image as though it is a physical surface. Phong rendering with IP•Graphics–>Render (Phong) allows the position of the light source and the specularity of the “surface” to be adjusted to produce a wide range of results.


Original Quarter image, and Phong rendered with the light at 60 degrees elevation
in a compass direction of 300 degrees (northwest) and surface specularity = 0.8


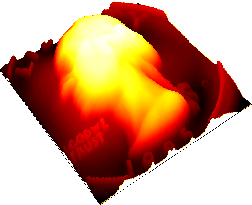
Phong rendering with the specularity = 1.0 and the light source at 87 and 90 degrees elevation
It is also possible to render the data as a perspective-corrected surface with an optional grid superimposed, or with the surface shown in photorealistic mode, or with the Phong rendered appearance superimposed. Place the image into the second image memory ( IP•2nd Image –> Setup ) and then use IP•Surface Processing–> Plot 2nd as Surface or –> Reconstruct Surface with Overlay to create a variety of representations.
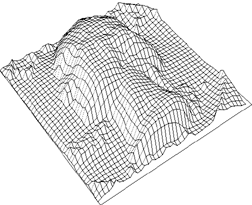
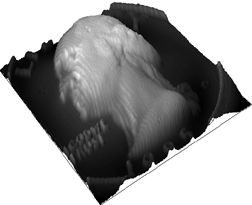
Examples of surface rendering with a grid, photorealistic surface modeling,
superimposed Phong rendered surface, and a pseudo-color table.
3.B. Are feature edges important?
3.B.1. Edge enhancement with derivative operators
Locating edges in images has been a major area of algorithm development in image processing. Edges are used for many purposes. Thresholding the edges and filling provides a way to create an image of features whose centers are similar in brightness (such as typical SEM images of particles or pores). Thresholding and skeletonizing, described in sections below, can delineate boundaries between structures (measuring the length of these lines provides a stereological tool to determine the surface area in the 3D structure). This is particularly important when the boundaries are characterized by a change in brightness rather than any particular brightness value.
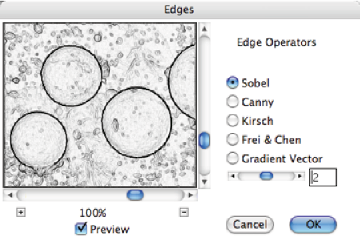
The IP•Process–>Find Edges dialog with the SEM_Part image.
A variety of methods ranging from the simple Sobel to more advanced techniques like the Frei and Chen use multiple convolution operators. Thinning down the edge response to single-pixel width (the Canny filter) marks the most probable location of the edge. These routines are selected in the IP•Process –> Find Edges plug-in. Nonlinear operators (e.g., IP•Rank–>Range is the difference between brightest and darkest values in a neighborhood) and statistical operators (e.g., IP•Process–>Variance ) are also useful.
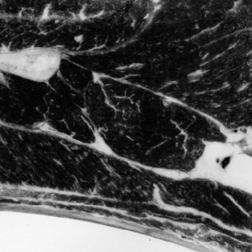
Original Beef image (fragment) and Canny edge filter

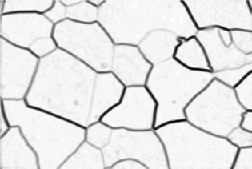
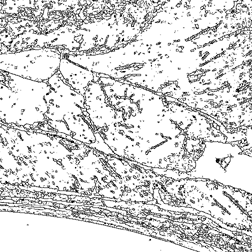
Original Gr_Alum image and the result of the variance operator
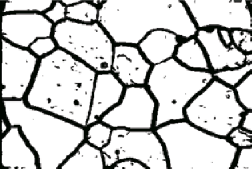
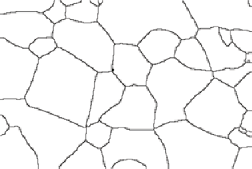
Thresholding and skeletonizing produces lines that mark the grain boundaries
3.B.2. Increasing edge sharpness and region uniformity
Boundaries between structures or regions may be marked by either lines or by steps, localized changes in color or brightness. However, in real images these steps are often blurred, either by sample preparation, optical resolution, or the finite size of pixels. Statistical procedures such as maximum likelihood techniques ( IP•Process–>Sharpen Steps ) can reproducibly assign doubtful pixels to regions and create abrupt transitions that facilitate thresholding and segmentation.
Dendrite image (enlarged fragment) and the result of applying a maximum likelihood operator